
Presentation
భావన - భాష | Concepto - Lenguaje | ಪರಿಕಲ್ಪನೆ - ಭಾಷೆ

Let’s begin to conceptualize:
Language should fit concepts and concepts should fit reality (Professor F. William Lawvere).
With languages as a formal tool to present concepts, we have all the reason we need to work on presentations in terms of generators and relations. Let’s start with dynamical systems.
Full Disclosure:
This is all the motivation I need to get going, going all the way to subjective vs. objective via intensive vs. extensive, function algebra vs. figure geometry reminiscent of structure-semantics adjointness, which is distinct from the adjointness involving presentations of concepts (of course, related) that is our immediate focus. Sooner than later, we’ll get there, albeit slowly. Equally important: please feel free to shred it all apart if that’s what you think it deserves, i.e., red carpet for unvarnished critique (along with your corrections of any mistakes I might make in the following)!
Here’s a dynamical system:
.
.
.
I am so hungry … I’ll be back soon … amazing how I hardly feel a thing doomscrolling ad nauseam … now that I sat down to do an exercise from The Textbook: Conceptual Mathematics, hunger, thirst, et al. are all queuing ;)
Disclaimer: just in case you are wondering: how long is your lunch break? It all goes back to my ancestry: Kumbhakarnudu (as much as I’d love to entertain you, I’m sorry I got to wake up the sentient urge to understand that’s been in coma ;)
I don’t know about you, but for reasons unbeknownst to me: first I’m fascinated, and then I’m fixated.

This Dalmatian picture that’s credited to R. C. James: pure brilliance! It enlightened me (beyond the reach of words, as is the case with any enlightenment ;) when security person at a place I used to work showed me that picture and asked me: What do you see? Cut to chase, it’s in every paper, book, course, especially in the context of illustrating: what you see depends on what you think. That’s the first-half of fascination. Now that you are back with your soda and popcorn (anti-alphabetical order), having concluded R. C. James must have been one of those German Gestalt dudes, I embarked on a mission possible to find the scientist R. C. James who opened my eyes (well, truth be told, it’s the security person on that auspicious late night shift). I thought it must have been a figure in one of the papers published by R. C. James: days, weeks, years went by ... searched, searched, and more than I searched, as is my wont, I wrote; I wrote to all the vision scientists I knew, then to all the psychologists (not dat pinker: dumber than Buridan’s donkey ;) One day I got a confession, so to speak, from, if my memory serves me well, Professor Goldstein, who authored a textbook on psychology, which is used in almost all psychology courses all over the world (world according to the USA). Professor Goldstein used the R. C. James’ Dalmatian image in his textbook and in all subsequent zillion reprints / editions; simply put, he made money. Professor Goldstein, having a heart of gold, felt that he should share some (note *some*, for it’s one of the protagonists of our story) of the royalties he earned with R. C. James, but he couldn’t find R. C. James; he then decided to find R. C. James’ next-gen: his daughters, sons, granddaughters, et al., someone and / or anyone remotely related to R. C. James to express his gratitude to R. C. James, along with the cash money he felt he owed to R. C. James. Cut to chase:
R. C. James didn’t exist.
As I began (there are [were and will be] many beginnings, just in case you’re new to my neighborhood ;) to study the section:
Presentations of dynamical systems
(Conceptual Mathematics, Session 15, p. 182), by the time I got to the third sentence: I was like, I was, was like, like ..., gone-case …, full-on the USA teen-mode …. (Tangential as it may read, ellipsis “…” is a word consisting of three dots with no spaces in between; so as with any word, there should be a space before it, and in case it’s the end of a sentence, then there must be a period right after the ellipsis, along with commas, colons, and semi-colons as is conventional with words in general; most important of all: no one (Obama exempted ;) is allowed to begin a sentence with an ellipsis). While I am in the venting biz, I might as well: I also don’t like the two spaces I use to separate sentences being squished into one (one space to separate words; two spaces to separate sentences).
Going back to that third sentence: How on earth can the number of maps from one object to an object depend on the presentation (of the objects)? So, I went back and began to read slowly, which made me realize that: Rules to calculate the number of maps between objects depend on the presentations of the objects. Whew, feels much better :) So, I began to write down different “presentations”, just to see how the rules to calculate the number of maps between presented objects change. Along the way, I realized that I should first reproduce what is already done before going on to discover / invent like a headless chicken that is contemporary AI ;)
Fast-forward to Exercise 7 (Conceptual Mathematics, p. 185 / 183), according to which there are 14 maps, but I could find only 12 :(…
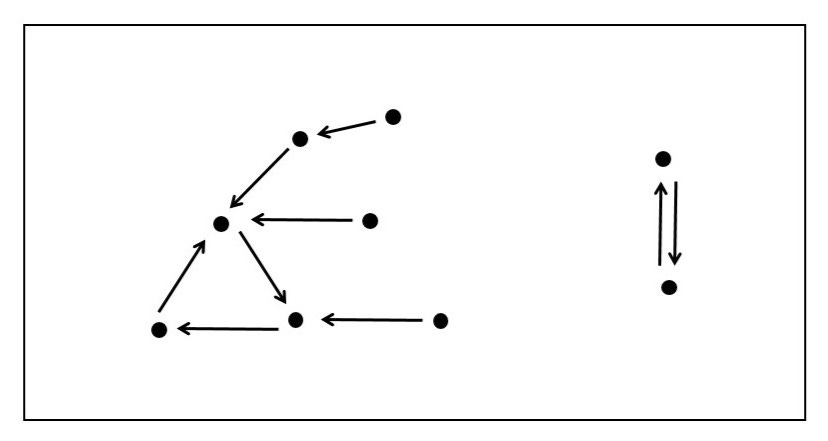
α: X --> X
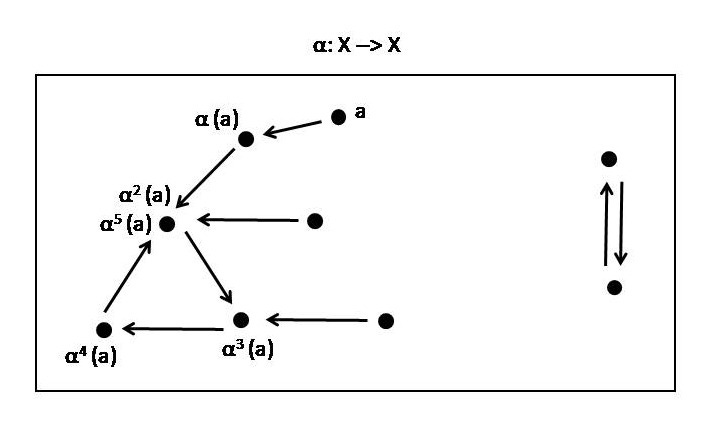
This is our dynamical system α: X --> X of interest. Let’s look at it to find what we see. Seeing includes not only seeing that which is, but also seeing that which isn’t in whatever we are looking at. First, let see what we don’t see: we don’t see two or more arrows leaving a dot! With dots as states of the dynamical system α: X --> X, the set of states is:
X = {•, •, •, •, •, •, •, •, •}
As much as I admire Cantor, we can’t go far with this Kardinalen of lauter Einsen. So, let’s name the states. First, note that there are states that you can’t enter, i.e., states x that are not the value of the endomap α for any element x’ of the set X of elements, i.e., x ≠ α (x’), for any x’ in X, which are those dots that are not a target of any arrow in the picture. Then there are states that are accessible; visually speaking: dot which is the target of at least one arrow. Switching to dynamical systems lingo, states that the system dynamics moves into, i.e., x = α (x’) for at least one x’ in X. Now given the stingy business we are in, we don’t want to waste a name on any state, which can otherwise be addressed in terms of the already named states. Simply, put we can refer to x as α (x’), and save all the pixels that went into the making of new name x. This brings us to the question that the woke, hopefully, wakes up to: Who deserves a name? Since inaccessible states are not states that are values of the system dynamic, there is no escaping the exercise of endowing them inaccessibles a name of their own, especially if we are into exhaustive census of the states of our dear dynamical system α: X --> X. Looking at the picture of our dynamical system, we find there dots to which no arrow is pointing, i.e., three inaccessibles. So, let’s name dem three dots: a, b, and c. Let’s say you are state c, then thanks to the system dynamic, you’ll end up as state α (c), which, in turn, ends up as α2 (c), which, in turn, turns into state α3 (c), which, in turn, into α4 (c), a state that happens to be already endowed with a name of its own α (c); this return, this reunification calls for a dreaded celebration (equation ;)
α4 (c) = α (c)
Please don’t ask me: which one of the two said “you complete me”?
Rule #1: If a task T (such as our presentation, our dishwashing, our weekend laundry) involves subtasks: t1, t2, ..., and tn, then the most efficient way to leave the task incomplete until the next kalpa is to begin with a subtask of your choice ti, move on to another subtask tj as and when you feel like it, completely unmindful of the task-status (complete / incomplete), leave alone task-order.
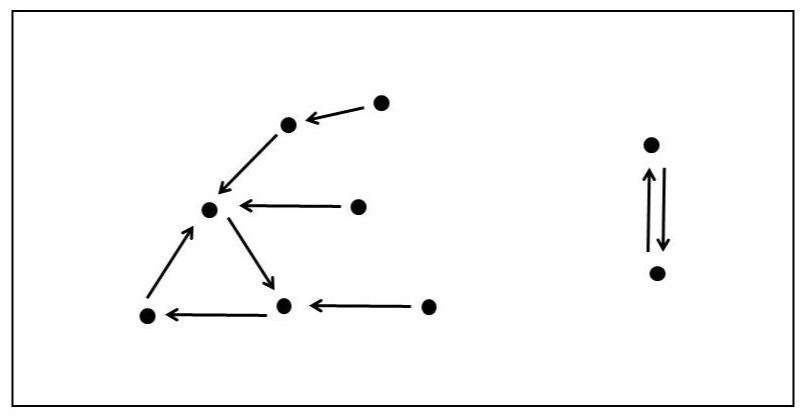
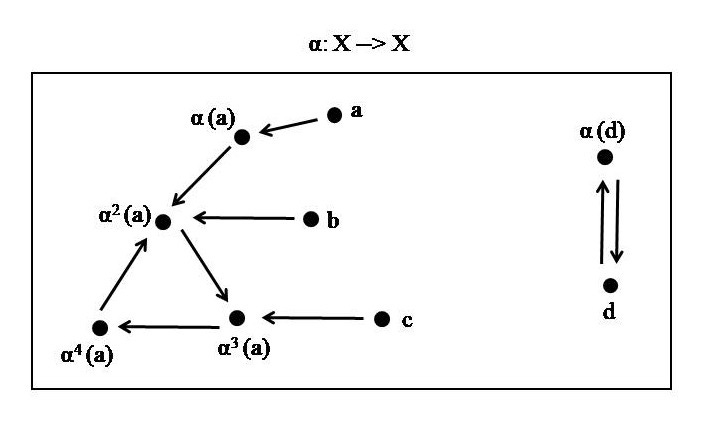
Now that we know a thing about doing things, let’s try to finish what we started: naming those states that must be named. Now, let’s look at our dynamical system, we sure did name the inaccessible states. These inaccessible states a, b, and c, along with all the states into which they can evolve into thanks to the system dynamic α, are not all that are there. There is another part or piece of the dynamical system which is inaccessible from the named states: the two-cycle. We missed this two-cycle, in part, because neither of its two states in inaccessible, the criterion we used to baptize states. In any cycle, every state is accessible. What now? Just name one of the states of the cycle (thinking is the most valuable thing to waste on things that don’t call for thinking; oftentimes I wondered: what on earth made MLK think of thinking as “a terrible thing”? I think it’s evil Chomsky ;) Moving along here’s our dynamical system with its distinguished named states.
α: X --> X
back before the next kalpa ;)
…
What shall we call this set G = {a, b, c, d}? If we called G a set of states that are inaccessible, then the state d would protest. If we call G a set of states that (together) generate all states by virtue of the system dynamics (becoming) or being (e.g., a, b, and c), then we good. Next, let’s see how a generator, say a, generates those states that it generates. Starting with a, we have:
a --> α (a) --> α2 (a) --> α3 (a) --> α4 (a) --> α5 (a)
Now we named all the states in the part / piece of the dynamical system that includes the generator a. There are two commandments, lost in deep-time, about naming:
1. One name shall not name two things.
2. One thing shall not have two names.
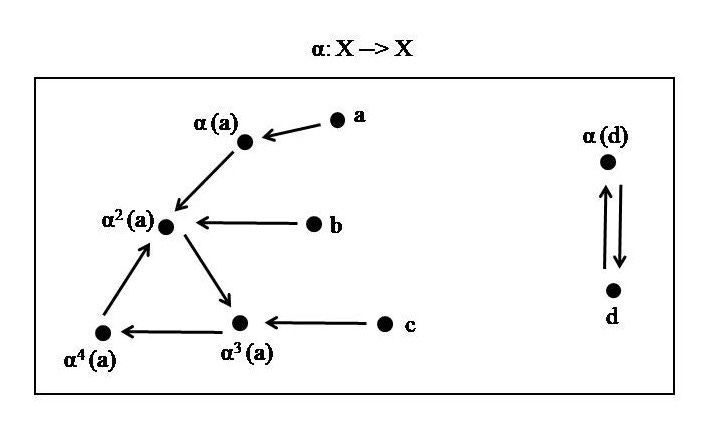
One the two crimes-against-naming committed is brought into figural salience for all to see:
Which one of the two commandments did we violate? Is there a way to atone for our sins? Let me go check with The God; in the meantime, you do you ;)
Before I uttered a syllable, The (omniscient) God spoke loud and sounded logical (though not the para-consistent kind that’s all the rage now ;) First prophet would be the first even in the absence of the last, but last prophet wouldn’t be the last but for the first (fatwa time, fortunately I wouldn’t be the first Indian ;) Translating their theology into our dynamical systems, we go with the first name: α2 (a), and acknowledge the last in terms of its relation to the first that’s all too obvious:
α5 (a) = α2 (a)
Moving along, beginning with b, we have:
α (b) = α2 (a)
Next tracing the evolution of the state c, we find:
α (c) = α3 (a)
Tracing the state d, we find:
α2 (d) = d
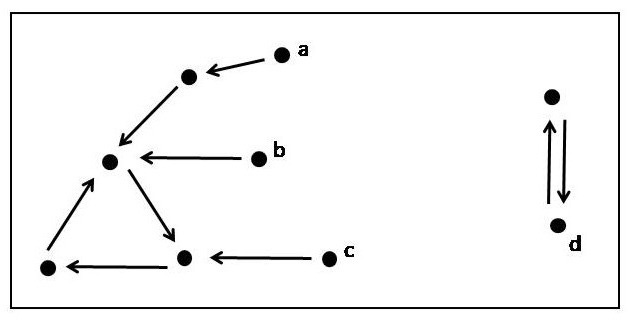
Now, labelling each state with its first name (and not the last, simply because thanks to time there will be a next to the so-called last, which for the time being only will be the last, i.e., until the next in time, which will strip it of its self-anointed The last status ;) here’s our dear old dynamical system.
Let’s catalog all that we have so far:
Generators, G = {a, b, c, d}
Labels, L = {a, α (a), α2 (a), α3 (a), α4 (a), b, c, d, α (d)}
Relations, R:
(i) α5 (a) = α2 (a)
(ii) α (b) = α2 (a)
(iii) α (c) = α3 (a)
(iv) α2 (d) = d
Now that we have generators G, labels L, and relations R, do we have a presentation of our good old dynamical system:
α : X —> X
(where set X is the same old set X of states; states now flaunting their unique names:
X = {a, α (a), α2 (a), α3 (a), α4 (a), b, c, d, α (d)})?
While you may or may not ponder presentations, let me go back to typing text and drawing pictures, which shouldn’t be construed as:
I am done pondering presentations!
later gator ;)
Before we get to counting maps, let’s try to get a feel for what maps do as they map. We think of maps as structure-respecting maps, which is fine and dandy. Let’s rephrase it by noting what maps don’t do. Maps don’t map equal to not equal. Just to sound more learned than I am, we may say:
Naturality Preserves Equality.
In a less mystifying tone, functions don’t map any element of its domain set to two (or more) elements of its codomain set. In the category of functions, equality of values of (any number of) elements of a domain function is preserved in the sense of mapping all the domain elements with equal values to elements whose values are equal in the codomain function. So is the case with dynamical systems, which are but a special case of functions, i.e., those functions with codomain = domain, aka endomaps. How about equalities in dynamical systems? Yes yes, there are equalities; and we have already noted the equalities encountered in our dynamical system as relations R:
α5 (a) = α2 (a)
α (b) = α2 (a)
α (c) = α3 (a)
α2 (d) = d
(Parenthetically speaking, does the number of relations (above 4) got something to do with the number of generators G = {a, b, c, d}, which is |G| = 4.)
Let us consider a map f: α —> β from the all too familiar, hopefully by now, domain dynamical system α: X —> X to a codomain dynamical system β: Y —> Y. At this point, we know not much about the codomain; so, we go with what we know. For a function f: X —> Y to be a map of dynamical systems, reciting the ritualistic mantra: the function f must preserve the structure, i.e., satisfy:
fα = βf
Let’s say the function f: X —> Y maps one of our generators in the domain set to an element of the codomain set, i.e.,
f (a) = a’
Given that one of our relations involves only the above generator, as in:
α5 (a) = α2 (a)
which when compounded by our newfound obsession with equality, we can’t help but ask: is the above equality preserved by the map f satisfying:
fα = βf
and given its value at one of the domain generators
f (a) = a’
Let’s start with the defining condition on the function f to be a map of dynamical systems:
fα = βf
Evaluating at the only element whose value we are given, i.e.,
fα (a) = βf (a)
f (α (a)) = β (a’)
Not knowing where to go from here, let’s begin with the very equality that we want to check if it’s preserved by the map f of dynamical systems:
α5 (a) = α2 (a)
Note that the above equality is nothing but an element of the domain set X of the function f: X —> Y. So, let’s see where this point is mapped to by the function f.
f (α5 (a)) = f (α2 (a))
f (α (α4 (a))) = f (α (α (a)))
fα (α4 (a)) = fα (α (a))
Now we deploy our Brahmastra:
fα = βf
resulting in:
βf (α4 (a)) = βf (α (a))
β (fα (α3 (a))) = β (fα (a))
β (βf (α3 (a))) = β (βf (a))
β2 (fα (α2 (a))) = β2 (f (a))
β2 (βf (α2 (a))) = β2 (a’)
Note that we deployed Vishnuchakra along with the Brahmastra we been deploying in going from one equality to its descended equality. Let’s continue:
β3 (fα (α (a))) = β2 (a’)
β3 (βf (α (a))) = β2 (a’)
β4 (fα (a)) = β2 (a’)
β4 (βf (a)) = β2 (a’)
β5 (f (a)) = β2 (a’)
β5 (a’) = β2 (a’)
which is an element in the codomain set Y.
Thus we find that the equality:
α5 (a) = α2 (a)
in the domain dynamical system
α: X —> X
is preserved as the “same” equality:
β5 (a’) = β2 (a’)
in the codomain dynamical system β: Y —> Y.
Thanks to the function f: X —> Y, merely specified by its mapping of a generator in its domain set X to an element of its codomain set Y:
f (a) = a’
and satisfying the required commutativity condition to be a map of dynamical systems:
fα = βf
are the two indispensables in finding equality-preservation.
One done and three more to find; and then there’s the whole enchilada of counting maps.
Fear not, for I’ll be back before long to get going and going and going :)
Happy Wednesday :)
It’s high time we accelerate.
Moving along to the second relation:
α (b) = α2 (a)
we need:
f (b) = b’
in addition to the:
f (a) = a’
and
fα = βf
(we already have) in order to show that the map
f: α —> β
preserves the equality:
α (b) = α2 (a)
Once again note that the above equality is nothing but an element of the domain set X of the function f: X —> Y. So, let’s see where this point is mapped to by the function f.
f (α (b)) = f (α2 (a))
βf (b) = fα (α (a))
β (b’) = β (fα (a))
β (b’) = β (βf (a))
β (b’) = β2 (f (a))
β (b’) = β2 (a’)
Thus we find that our beloved map of dynamical systems:
f: α —> β
preserves the domain equality:
α (b) = α2 (a)
in the codomain equality:
β (b’) = β2 (a’).
Moving to the next relation:
α (c) = α3 (a)
we realize that we need:
f (c) = c’
to show equality-preservation. Along the lines that worked in the two earlier relations, we begin with the domain equality:
α (c) = α3 (a)
and evaluate the function:
f: X —> Y
at the element of the domain set given by the above equality, i.e.,
f (α (c)) = f (α3 (a))
βf (c) = βf (α2 (a))
β (c’) = β (fα (α (a)))
β (c’) = β2 (fα (a))
β (c’) = β3 (f (a))
β (c’) = β3 (a’)
which is exactly the preservation of the domain equality:
α (c) = α3 (a)
by our good old dynamical systems map:
f: α —> β
in the codomain dynamical system.
Now we get to the last relation:
α2 (d) = d
and saving some pixels:
f (d) = d’
f (α2 (d)) = f (d)
fα (α (d)) = d’
β (fα (d)) = d’
β2 (f (d)) = d’
β2 (d’) = d’
which is exactly the preservation of the equality:
α2 (d) = d
Summing it all, given the domain generators:
G = {a, b, c, d}
along with the corresponding domain relations R:
α5 (a) = α2 (a)
α (b) = α2 (a)
α (c) = α3 (a)
α2 (d) = d
and with a function:
f: X —> Y
defined on the generators:
f (a) = a’
f (b) = b’
f (c) = c’
f (d) = d’
satisfying the commutativity condition:
fα = βf
required to be a map:
f: α —> β
from its domain dynamical system:
α: X —> X
to its codomain dynamical system:
β: Y —> Y
preserving the domain equalities:
α5 (a) = α2 (a)
α (b) = α2 (a)
α (c) = α3 (a)
α2 (d) = d
in the corresponding codomain equalities:
β5 (a’) = β2 (a’)
β (b’) = β2 (a’)
β (c’) = β3 (a’)
β2 (d’) = d’
thereby making the generators:
G = {a, b, c, d}
along with the corresponding relations R:
α5 (a) = α2 (a)
α (b) = α2 (a)
α (c) = α3 (a)
α2 (d) = d
a presentation of the domain dynamical system:
α: X —> X
of the dynamical systems map:
f: α —> β
provided it satisfies the one-one correspondence:
f: α —> β
———————
G’ = {a’, b’, c’, d’}
between dynamical systems maps f and sets G’ of values of generators of the domain dynamical system:
α: X —> X
satisfying the corresponding relations R’ in the codomain dynamical system:
β: Y —> Y
which means given a dynamical systems map:
f: α —> β
we can calculate the corresponding codomain generators:
G’ = {a’, b’, c’, d’}
which is what we did (in a generic-mode?). But this is merely the first half of the movie; post-intermission, given:
G’ = {a’, b’, c’, d’}
we calculate the corresponding dynamical systems map:
f: α —> β
This one-one correspondence, more specifically bottom-up one is what we use to count the number of maps from a domain dynamical system to a codomain dynamical system.
There is more to presentations (cf. universal mapping property / efficient / minimal), all of which I’ll get into, but for now, let me go off on a tangent: every time I look at one-one correspondences, I see mapobjects. Points of the mapobject:
1 —> βα
(1 is the terminal object) correspond to maps:
α —> β
which is the least interesting part, especially in comparison with the not-so-easy to calculate mapobject, which includes not only points (1-cycle), but also figures of various shapes (e.g., involutions, idempotents, n-cycles), along with their incidences (it may be noted here that every state of any dynamical system, which includes mapobjects of dynamical systems, is a state in a cycle or enters a cycle sooner or later; does this make calculating mapobjects of category of dynamical systems not all that revealing). Be that as it may, I think of calculating mapobjects all the time; points or set of maps is boring.
Given that we can think of a dynamical system:
α: X —> X
as a graph:
1X, α: X —> X
with the identity function 1X as the source map assigning to each arrow (element) of domain set X of arrows its source dot (element) in codomain set X of dots, and the endomap (dynamic) α as the target map assigning to each arrow (element) of domain set X of arrows its target dot (element) in codomain set X of dots (Conceptual Mathematics, pp. 140-141, 156), let me calculate a mapobject:
AA
of graph maps with the generic arrow:
A = • —> •
as both domain and codomain graphs (Conceptual Mathematics, Exercise 10, pp. 314, 327-330).
Pop quiz:
F = A
(with LHS and RHS in Spanish and English, respectively), but why???
P.S. I don’t know about me, but by the time I’m done, you’ll master all the Spanish you need to enjoy Tijuana :)
P.P.S. I haven’t forgotten the 12 maps I found (Conceptual Mathematics, Exercise 7, p. 185 / 183), which I will type soon, purty soon!
…
I might as well go with finding the number of dynamical systems maps:
f: α —> β
where the domain dynamical system is the way too well-known (reproduced below for your ready reference):
while the codomain dynamical system is the following:
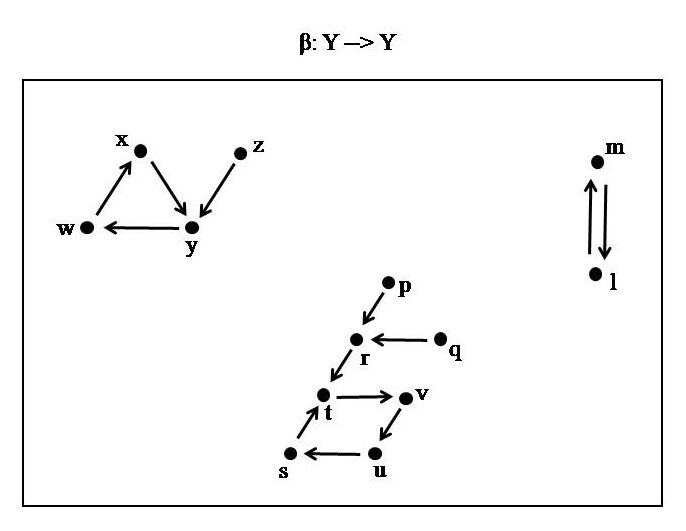
Note that, given n > m, any n-cycle can be mapped to an m-cycle, but no m-cycle can be mapped to any n-cycle.
First note that there is a 3-cycle in the domain dynamical system:
α: X —> X
which can’t be mapped to the 4-cycle in the codomain dynamical system:
β: Y —> Y
which is to say: we ignore the piece consisting of states:
{p, q, r, s, t, u, v}
of the above codomain dynamical system.
We start with the domain generators:
G = {a, b, c, d}
along with the corresponding relations R:
α5 (a) = α2 (a)
α (b) = α2 (a)
α (c) = α3 (a)
α2 (d) = d
and find functions:
f: X —> Y
defined on the generators:
f (a) = a’
f (b) = b’
f (c) = c’
f (d) = d’
satisfying the corresponding codomain relations R’:
β5 (a’) = β2 (a’)
β (b’) = β2 (a’)
β (c’) = β3 (a’)
β2 (d’) = d’
Let’s start with the state a and find all values:
f (a) = a’
that satisfy:
β5 (a’) = β2 (a’)
We find that:
f (a) = z, y, w, and x
are all the values of f (a) satisfying the aforementioned required relation involving the value of the function f at the state a only, i.e.,
β5 (z) = β2 (z)
β5 (y) = β2 (y)
β5 (w) = β2 (w)
β5 (x) = β2 (x)
Next, for each one of the above four values {z, y, w, x} of f (a), we find all values of f at the state b, i.e.,
f (b) = b’
that satisfy the required codomain relation:
β (b’) = β2 (a’)
With a’ = z, we find that:
f (b) = y
satisfies:
β (y) = β2 (z)
Next, with a’ = z, let’s find:
f (c) = c’
satisfying:
β (c’) = β3 (a’)
With
f (c) = w
we have the required equality:
β (w) = β3 (z)
Next, let’s find:
f (d) = d’
satisfying:
β2 (d’) = d’
which is completely independent of the values of f at all of the above three states:
{a, b, c}
With d’ = l, we have the required equality:
β2 (l) = l
So is the case with d’ = m, i.e.,
β2 (m) = m
So, for each triple of values of f at the states a, b, and c, we have twice the number of functions satisfying all four required equalities. With
f (a) = z, f (b) = y, f (c) = w, and f (d) = l
we have all four required equalities:
β5 (z) = β2 (z) = w
β (y) = β2 (z) = w
β (w) = β3 (z) = x
β2 (l) = l
So is the case with:
f (a) = z, f (b) = y, f (c) = w, and f (d) = m
satisfying the required relations:
β5 (z) = β2 (z) = w
β (y) = β2 (z) = w
β (w) = β3 (z) = x
β2 (m) = m
Now that we got a feel for what’s involved, here’s the list of 12 sets of codomain generators, all of which satisfy the required codomain relations.
a b c d
w x y l
w z y l
x y w l
y w x l
y w z l
z y w l
w x y m
w z y m
x y w m
y w x m
y w z m
z y w m
Row 0 on the top lists domain generators:
G = {a, b, c, d}
Rows 1 to 12 are the values at the above generators, i.e., codomain generators:
G’1 = {f (a) = w, f (b) = x, f (c) = y, f (d) = l}
G’2 = {w, z, y, l}
.
.
.
G’12 = {z, y, w, m}
each of which satisfies the required codomain relations:
β5 (f (a)) = β2 (f (a))
β (f (b)) = β2 (f (a))
β (f (c)) = β3 (f (a))
β2 (f (d)) = f (d)
Let’s try the codomain generators:
f (a) = w, f (b) = x, f (c) = y, f (d) = l
to see if they satisfy each one of the codomain relations beginning with the first:
β5 (f (a)) = β2 (f (a))
β5 (w) = β2 (w) = y
next:
β (f (b)) = β2 (f (a))
β (x) = β2 (w) = y
third:
β (f (c)) = β3 (f (a))
β (y) = β3 (w) = w
and finally the last relation:
β2 (f (d)) = f (d)
β2 (l) = l
I don’t know about you, but I’m done for now.
Happy Thursday :)
‘‘‘
You thought I was done ;) I’m a concept-variant of dat rap: …, or die tryin, i.e.,
Bring concepts into figural salience for all to see (or die tryin ;)
(will be back soon … laptop says it must update and restart … must have been an inauspicious moment that I turned dis thing on ;)
…
Even infinite dynamical systems may have finite presentations. For example, N↷𝜎 is presented by one generator, 0, and no equations! Note that our dynamical system is:
N↷𝜎 = [0 —> 1 —> 2 —> … ]
where the endomap 𝜎: N —> N is defined as 𝜎 (n) = n + 1. With generator as that which can’t be generated (inaccessible state) and that which generates what all states that it generates, we readily recognize 0 as the generator (because there is no arrow pointing to 0) and furthermore 0 is the only generator because all the remaining states generated by 0 alone as in:
N↷𝜎 = [0 —> 𝜎(0) —> 𝜎2(0) —> … ]
So, as you can see, our infinite dynamical system has a finite presentation in the sense it is presented by one generator and no equations (but, of course, there the set of labels is not finite).
—
Back to our first love: the one-one correspondence
f: α —> β
———————
G’ = {a’, b’, c’, d’}
we worked our way from top f: α —> β to bottom G’ = {a’, b’, c’, d’}. It’s the bottom-up part, i.e., given codomain generators G’ = {a’, b’, c’, d’} there is exactly one dynamical systems map f: α —> β that sent me spiraling, so to speak. Exactly one means that the number of maps |f| is not 0, not 2, not 3 …. For some reason, I got fixated on 2, i.e., showing that there aren’t 2 maps, which I thought could be done by assuming that there are 2, say, f1 and f2, and then showing that f2 = f1. I don’t think I went anywhere with that, so I settled to constructing a map f from the given G’.
The bottom-up process is, to be exact, as follows: given generators G’ = {a’, b’, c’, d’} satisfying the relations R’, there is exactly one map f with f(a) = a’, f(b) = b’, f(c) = c’, and f(d) = d’.
In constructing the unique map f, first note that the function f: X —> Y is one-one (i.e., f(x1) = f(x2) ==> x1 = x2) when restricted to generators, as you can see from the following list of values of f at the domain generators, which we encountered in counting the number of dynamical systems maps (with the caveat that we found only 12; not 14). Here’s the listing of 12 sets of codomain generators; note that no two generators have the same value:
a b c d
w x y l
w z y l
x y w l
y w x l
y w z l
z y w l
w x y m
z y m
x y w m
y w x m
y w z m
z y w m
Row 0 on the top lists the domain generators:
G = {a, b, c, d}
satisfying domain relations relations R:
α5 (a) = α2 (a)
α (b) = α2 (a)
α (c) = α3 (a)
α2 (d) = d
and we are looking for a function:
f: X —> Y
defined on the generators:
f (a) = a’
f (b) = b’
f (c) = c’
f (d) = d’
We already know all too well that the codomain generators G’ = {a’, b’, c’, d’} satisfy the corresponding codomain relations R’:
β5 (f (a)) = β2 (f (a))
β (f (b)) = β2 (f (a))
β (f (c)) = β3 (f (a))
β2 (f (d)) = f (d)
Given all these, i.e., that the domain set X of states contains generators G = {a, b, c, d} satisfying the relations R:
α5 (a) = α2 (a)
α (b) = α2 (a)
α (c) = α3 (a)
α2 (d) = d
and keeping in mind that every state of a dynamical system ends up as a state of cycle sooner or later if it’s not a state of a cycle already, let’s try to find all the states of the domain dynamical system, i.e., the elements of the set X of states:
First, we have a state a, which along with the relation: α5 (a) = α2 (a), which is a single state, tells us that there are the following distinct states in between (starting with a): α(a), α2(a), α3(a), and α4(a). Next, beginning at the state b, going by the corresponding relation: α (b) = α2 (a), we find no unlabeled states. Moving along to the state c, going by its relation: α (c) = α3 (a), once again we find no unlabeled states. Lastly, starting at the state d, and going by its relation: α2 (d) = d, we find an unlabeled state α(d). So, our domain dynamical system has the following set of states:
X = {a, α(a), α2(a), α3(a), α4(a), b, c, d, α(d)}
Next order of biz is to specify the values of the function:
f: X —> Y
we already know the values of f at the domain generators G = {a, b, c, d}
f (a) = a’
f (b) = b’
f (c) = c’
f (d) = d’
now we have to find the values of f at the remaining elements of X:
α(a), α2(a), α3(a), α4(a), and α(d)
f (α(a)) = ?
Since f is a map of dynamical system, i.e.,
f: α —> β
satisfying:
fα = βf
f (α(a)) = βf(a) = βa’
f (α2(a)) = βf(α(a)) = β2f(a) = β2a’
f (α3(a)) = βf(α2(a)) = β2f(α(a)) = β3f(a) = β3a’
f (α4(a)) = βf(α3(a)) = β2f(α2(a)) = β3f(α(a)) = β4f(a) = β4a’
f (α(d)) = βf(d) = βd’
Now we have a complete specification of the function
f: X —> Y
at every element of its domain set:
X = {a, α(a), α2(a), α3(a), α4(a), b, c, d, α(d)}
as follows:
f (a) = a’
f (α(a)) = βa’
f (α2(a)) = β2a’
f (α3(a)) = β3a’
f (α4(a)) = β4a’
f (b) = b’
f (c) = c’
f (d) = d’
f (α(d)) = βd’
For now, let’s call it a day / done, so that we can move on to presentations of maps via cographs. Remember we have a long ways to get to our objective of bringing into figural salience the adjointness between conceptual and formal for all to see (sometime before the end of next kalpa ;)